Sosus è l’acronimo di Sound Surveillance System, un sistema statunitense di sorveglianza idroacustica fisso subacqueo nato per rilevare la presenza di sottomarini avversari e localizzarli. Il Sosus, insieme al suo equivalente imbarcato Surtass (Surveillance Towed Array Sensor System), prende il nome di Iuss (Integrated Undersea Surveillance System).

Come funziona il Sosus?
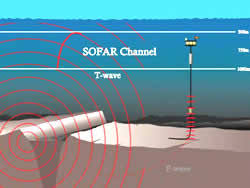
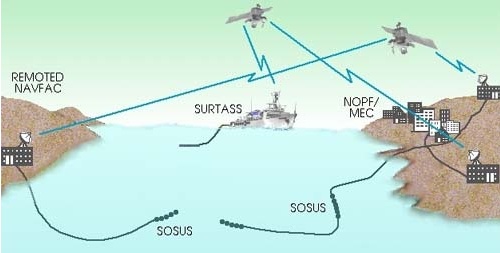
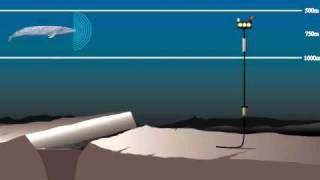
Sostanzialmente il Sosus è una catena fissa di idrofoni sparpagliati negli oceani e mari del mondo che capta e analizza i segnali a bassa frequenza emessi dalle unità subacquee per localizzarle attraverso un processo di triangolazione. Un segnale acustico a bassa frequenza, infatti, è in grado di viaggiare a grande distanza in un mezzo denso come l’acqua.
Questi segnali vengono analizzati da un dispositivo, chiamato spettrogramma del suono, originariamente nato per studiare i suoni del parlato e adattato dalla AT&T per scopi militari. Questi strumenti, chiamati Lofar (Low Frequency Analysis and Recording) sono installati presso delle Navfac (Naval Facilities) appositamente create per analizzare i suoni sottomarini a bassa frequenza. Quelle che vengono definite “firme sonore” generate dai sottomarini possono quindi essere viste in quelli che venivano chiamati Lofar-grammi e sono distintive per ciascuna unità.
Con uno straordinario sforzo ingegneristico, durato decenni, sul fondo degli oceani sono state posizionate schiere di idrofoni collegati tramite cavi sottomarini ai centri Navfac di elaborazione situati sulla costa.
Nel 1972, si introduce il concetto di trainare una lunga fila di idrofoni da una nave di superficie, risultato essere un metodo molto efficace per rilevare i sottomarini a grandi distanze. Le navi di sorveglianza oceanica dotate di Surtass (T-Agos) sono state progettate specificamente per trainare array di idrofoni molto lunghi (circa 2400 metri) navigando a bassa velocità, in aree dove sono assenti i sensori fissi, quindi dove veniva meno la copertura acustica.
Le navi T-Agos sono piattaforme uniche in quanto i loro marinai (Mildet) hanno accesso alle apparecchiature sonar solo quando sono a bordo.
Quando l’U.S. Navy si rese conto che i sottomarini stavano diventando più silenziosi e le distanze di rilevamento diminuivano, introdusse nel sistema Iuss i sistemi attivi. Si tratta di un nuovo tipo di sonar attivo a bassa frequenza (Lfa) che trasmette un segnale che viaggia verso l’oggetto immerso, rimbalza e ritorna al ricevitore. I sonar Lfa utilizzano una frequenza molto più bassa rispetto ai sonar attivi standard, quindi il segnale percorre distanze maggiori.
Il sistema ha raggiunto il suo apice durante la Guerra Fredda, sul finire degli anni ’80, con 11 centri Navfac / Nopf (Naval Ocean Processing Facility), 14 navi Surtass, due comandi Ocean Systems (Pacifico e Atlantico) con circa 4mila membri di personale.
La storia del Sosus.
La storia del Sosus si può far risalire alla Seconda Guerra Mondiale. La mancanza di conoscenze e informazioni sulle condizioni oceanografiche e acustiche al largo delle coste continentali aveva ostacolato gli sforzi della Marina degli Stati Uniti contro la minaccia sottomarina tedesca. Era evidente che la Kriegsmarine aveva informazioni migliori e una migliore comprensione di come sfruttare le caratteristiche delle acque degli oceani. Di conseguenza, dalla fine della guerra, l’U.S. Navy ha avviato un programma di indagini oceanografiche progettate per fornire informazioni più dettagliate su correnti, temperatura, salinità e altri fattori che compongono l’ambiente oceanico e influenzano la trasmissione del suono nell’acqua salata.
Ma il progenitore del Sosus è un altro sistema, nato per salvare le vite in mare. Durante la guerra era stato inventato un sistema per localizzare i piloti abbattuti in mare, chiamato Sofar (Sound Fixing And Ranging). Consisteva in tre o più configurazioni di idrofoni con una separazione orizzontale sufficiente per ottenere una precisa triangolazione del segnale dato da una piccola carica esplosiva rilasciata dal pilota in mare. Durante il conflitto vennero costruite diverse stazioni Sofar, ma non furono mai state utilizzate come previsto. Invece, diventarono i primi e più importanti siti per la ricerca sulle caratteristiche della trasmissione del suono e del rumore negli oceani.
All’inizio del 1950, su raccomandazione nacque il Progetto Jezebel, un programma di ampio respiro dedicato al rilevamento, alla classificazione e alla localizzazione dei sottomarini nemici.
Successivamente un incontro tra ammiragli, esponenti della Bell Telephone Laboratories e un rappresentante del Massachusetts Institute of Technology portò al Progetto Hartwell: un gruppo di ricerca autorizzato a studiare gli aspetti della guerra antisommergibile. Esperimenti condotti durante la primavera del 1950 hanno rivelato che i sottomarini irradiano suoni forti nello spettro delle basse frequenze. Il gruppo di ricerca del progetto Hartwell scoprì dettagli significativi dei suoni a bassa frequenza, che, come abbiamo già visto, avrebbero permesso l’identificazione dei sottomarini.
Sotto una spessa cappa di segretezza, alla fine del 1950, l’Office of Naval Research (Onr) finanziò l’AT&T e la sua divisione di produzione, la Western Electric, per sviluppare un sistema di sorveglianza sottomarino progettato per rilevare e tracciare i sottomarini sovietici utilizzando proprio il sistema Sofar.
Nel 1951, un primo array di sei elementi fu installato a Eleuthera Island alle Bahamas, e poco tempo dopo si aggiunsero altre tre stazioni (chiamate “stazioni Caesar”), che insieme alle prime sei ebbero il compito di fornire sorveglianza al largo della costa orientale degli Stati Uniti. Questa prima schiera di sensori comprendeva 40 idrofoni disposti lungo un cavo di circa 300 metri di lunghezza posato sul fondo del mare a una profondità di 430 metri.
Nel 1954 arrivò l’autorizzazione a sviluppare e costruire altre dieci stazioni Caesar, tre nell’Oceano Atlantico e sette nel Pacifico (isole Hawaii comprese). Il 18 settembre 1954 la Ramey Air Force Base di Puerto Rico fu il primo Navfac incaricato: questa data è stata presa per stabilire la nascita ufficiale del sistema Sosus.
Questi primi array erano situati sul bordo della piattaforma continentale al margine della scarpata, in modo da affacciarsi sull’oceano profondo. A quel tempo, le lunghezze dei cavi erano limitate a meno di 241 chilometri e quindi i centri Navfac dovevano essere situati su quelle porzioni di costa dove la scarpata continentale era più vicina alla terraferma.
Gli anni ’60 videro lo sviluppo e la crescita della sorveglianza sottomarina. Nuovi Navfac vennero aperti poiché il sistema stava avendo successo. Per gestire i centri Navfac dislocati in tutto il mondo era stato quindi necessario creare due comandanti separati per i due oceani: Commander, Oceanographic Atlantic e Commander, Oceanographic Pacific.
Con gli anni ’70 arrivarono importanti aggiornamenti tecnologici sia nei sistemi a terra che in quelli sottomarini. I progressi nella tecnologia dei cavi hanno consolidato l’efficacia dei Navfac (diventati “super”), e di rimando cominciano le chiusure delle strutture più piccole e più vecchie: il primo super Navfac venne costruito a Brawdy, nel Galles, mentre parallelamente le forze statunitensi e canadesi hanno coordinato le operazioni nel Navfac di Argentia, Terranova. I super Navfac, in quegli anni, divennero Naval Ocean Processing Facilities (Nopf): queste strutture erano presidiate da operatori sonar e tecnici elettronici. Entro la metà degli anni ’70, il sistema Sosus vide la presenza di 20 Navfac, due comandi Ocean Systems e circa 3500 uomini impiegati.
Abbiamo già detto che, nel 1972, il sistema viene implementato con quello imbarcato Surtass diventando lo Iuss. La prima nave Surtass, la Usns Stalwart (T-Agos-1), fu messa in servizio nel 1984, seguita dalla Contender (T-Agos-2) e dalla Vindicator (T-Agos-3). Nel corso dei sette anni successivi, furono commissionate 18 navi di questo tipo, rendendo necessaria la creazione di una nuova struttura di riparazione di navi e array; così, lo Iuss Operations Support Center venne spostato a Little Creek, Virginia.
Con il rapido avanzamento della tecnologia, le strutture sono state consolidate, mentre la copertura è andata aumentando. La capacità di trasmettere in modo più efficace i dati acustici a una struttura centralizzata ha ridotto i requisiti di personale e ha portato alla chiusura di strutture sempre più piccole. Il Nopf di Dam Neck e quello di Whidbey Island, entrambi commissionati negli anni ’80; sono gli unici due ancora oggi in funzione dei dei 31 Navfac / Nopf costruiti.
Nel 1991, al termine della Guerra Fredda con la dissoluzione dell’Unione Sovietica, il sistema Iuss fu declassificato dopo 41 anni di segretezza. La flotta Surtass però continuò, se pur con meno enfasi, ad ampliarsi, con la messa in servizio nel 1992 della Usns Victorious (T-Agos-19), la prima nave Small Waterplane Area Twin-Hull (Swath). L’equipaggio del vascello è civile, tuttavia non conducono analisi acustiche: i dati vengono analizzati a bordo da personale militare o trasmessi a una struttura a terra.
Nel 1994, i comandi di sorveglianza sottomarina dell’Atlantico e del Pacifico, furono dismessi e si riunirono in un comando centrale situato a Norfolk, Virginia, che in seguito si trasferì a Dam Neck, Virginia. In quella decade il futuro del Sosus sembrava incerto, con l’U.S. Navy che sembrava volersi affidare più ai sistemi mobili imbarcati.
Gli anni ’90 infatti sono quelli della sperimentazione e graduale introduzione in servizio dei già citati sonar attivi a bassa frequenza (Lfa). Nel 2003, la nave di sorveglianza oceanica Mv Cory Chouest sarebbe diventata la prima operativa dotata di questa tecnologia.
Con l’emergere della minaccia cinese nel Pacifico tutte le navi Surtass furono trasferite alla flotta del Pacifico nel 2003. Alla fine del 2015, tre delle quattro navi della classe Victorious sono state dotate di una versione compatta di Lfa.
Lo sviluppo delle capacità future sta procedendo rapidamente proprio in forza del ritorno sui mari di potenze vecchie e nuove. In progetto c’è la costruzione di una nuova nave Surtass (T-Agos-X) oltre a una versione modulare facilmente dispiegabile del sistema ad array trainato, chiamata Expeditionary Surtass (o Surtass E). Questa fornisce un sistema di sorveglianza passiva in container modulari che possono essere installati a poppa di quasi tutte le navi con ponte piatto, fornendo un’enorme flessibilità per le operazioni di sorveglianza. Inoltre sono in fase di sviluppo numerosi piccoli sistemi, facilmente utilizzabili da qualsiasi tipo di nave. Il Maritime Surveillance Systems Program Office sta sviluppando sistemi di piccole dimensioni senza pilota per una rapida distribuzione in tutto il mondo che includono sensori passivi e attivi. Alcuni progetti attuali includono alianti subacquei, come alcune sonde automatiche cinesi per il rilevamento dei dati della colonna d’acqua rinvenute nelle acque dell’Oceano Indiano.
Il sistema fisso, il Sosus vero e proprio, non è però defunto: sono in corso sforzi per aggiornare e sostituire i cavi sottomarini esistenti e portarli agli standard necessari per rilevare i sottomarini più moderni e silenziosi, inoltre altre nazioni, come l’India, hanno intenzione di utilizzare la stessa tecnologia per sorvegliare gli stretti tra Oceano Indiano e Pacifico ed essere in grado di individuare e inseguire i sottomarini cinesi, che negli ultimi anni sono sempre più attivi nell’area dell’Indopacifico.
Ad oggi, la catena di sensori Sosus sottomarina copre le due coste del continente nordamericano, il Giuk Gap (acronimo di Greenland, Iceland, Uk), il tratto di mare tra le Svalbard e la Norvegia, i passaggi tra l’Alaska e il Giappone, parte del Mar Cinese Orientale e delle Filippine, il Mediterraneo Centrale, più qualche punto di ascolto dislocato tra le Hawaii, la porzione centrale dell’Atlantico Settentrionale e Meridionale e dell’Oceano Indiano.
Fonte: https://it.insideover.com/schede/guerra/che-cose-il-sosus.html